
雙臂力反饋遙操作機器人開放平臺
聯(lián)系電話:13720126958 / 13387619634一、產(chǎn)品簡介
雙臂力反饋遙操作機器人開放平臺是一種由操作人員在視覺系統(tǒng)的輔助下通過操縱力反饋手柄控制遠程機器人進行作業(yè)的機器人系統(tǒng),可廣泛應(yīng)用于遠程醫(yī)療診療、危險環(huán)境遠程作業(yè)等領(lǐng)域。雙臂力反饋遙操作機器人開放平臺為相關(guān)領(lǐng)域的科研人員提供了便利的開放性實驗環(huán)境,支撐科研人員快速構(gòu)建各類力反饋遙操作機器人實驗場景,對相關(guān)算法和軟件模塊進行測試。平臺也可以用于各種力反饋遙操作機器人原型系統(tǒng)開發(fā)和操作人員培訓(xùn)。

二、平臺功能
1.搭建力反饋要操作機器人教學(xué)科研環(huán)境
可以基于Matlab/Simulink及Gazebo/V-rep仿真環(huán)境構(gòu)建力反饋遙操作機器人數(shù)字孿生仿真系統(tǒng),在仿真環(huán)境下對主手端機器人的運動學(xué)模型、從手端機械臂的運動學(xué)、動力學(xué)等建立模型,并對主從機械臂各自的標(biāo)定、主手到從手的運動映射過程等過程進行仿真;可以建立從手機械臂的動力學(xué)模型,對從手運行過程中的柔順力控、虛擬墻阻抗控制等進行仿真。仿真算法可以便利的部署于物理環(huán)境下的從手機械臂控制器進行驗證。可以引入5G/TSN等新型通信媒介,分析通信延時對控制系統(tǒng)的影響和力反饋操作體驗的影響。
2.遠程診療系統(tǒng)原型搭建
通過3D視覺系統(tǒng),可以快速獲取人體姿態(tài)和位置信息,生成位置限制虛擬墻,輔助人工進行遠程診療操作。配置遠程通信系統(tǒng)和人機交互軟件,顯示診療過程相關(guān)信息。
3.工業(yè)工件檢測、打磨類應(yīng)用系統(tǒng)原型搭建
通過3D視覺系統(tǒng),可以快速獲取工件姿態(tài)信息,配合AR/VR輔助系統(tǒng)形成虛擬操作環(huán)境,輔助人工進行遠程作業(yè)。配置相關(guān)的數(shù)據(jù)采集、通信軟件及人機交互軟件,顯示作業(yè)過程相關(guān)信息。
三、產(chǎn)品特色
n 平臺所用機械臂可以開放底層控制,支持機械臂底層力矩、速度、位置控制,支持用戶基于Simulink軟件進行控制算法真機部署驗證;
n 完善的二次開發(fā)環(huán)境,配置完整的機器人運動學(xué)、動力學(xué)、運動規(guī)劃和力控制計算庫,易于二次開發(fā);
n 支持多種類型的主手操控設(shè)備和從手機械臂設(shè)備,機械臂法蘭同樣支持多種通信擴展,工具擴展和系統(tǒng)集成便捷;
n 支持3D視覺系統(tǒng)、從手機械臂末端六維力傳感器;
n 支撐擴展進行 AI 數(shù)據(jù)采集與 AGI 模擬研究等方面的研究、實踐任務(wù);
四、平臺組成
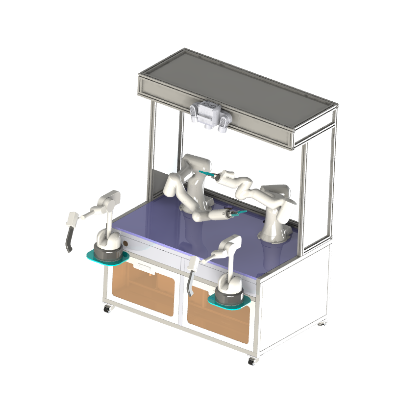
雙臂力反饋遙操作機器人開放平臺主要包含柔性協(xié)作六軸機器人、開放式機器人控制系統(tǒng)、6D力反饋系統(tǒng)、3D視覺系統(tǒng)等組成。
1、柔性協(xié)作六軸機器人
柔性協(xié)作機器人采用全關(guān)節(jié)力矩傳感器配置,通過全狀態(tài)反饋的直接力控制技術(shù),避障更靈活、碰撞檢測更靈敏,在兼顧位置控制高精度的同時具備高動態(tài)力控制與柔順控制能力。


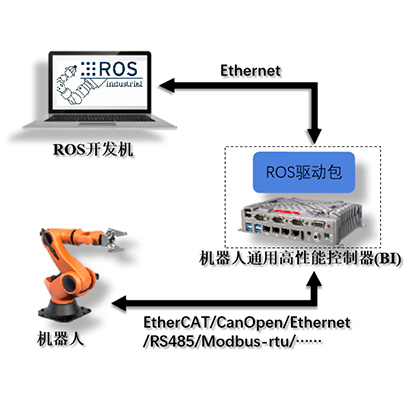
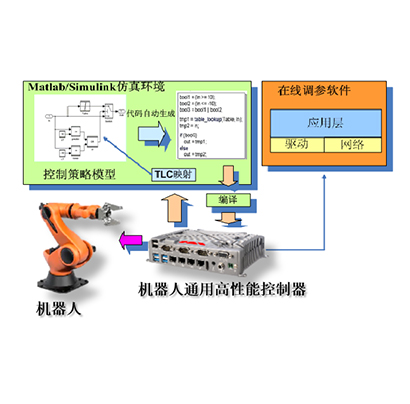
1、開放式機器人控制系統(tǒng)
整體:包括通信模塊、運動控制模塊和安全模塊,實現(xiàn)多種構(gòu)型機器人控制。可以快速搭建機器人研究或應(yīng)用平臺,支持機器人控制算法驗證及機器人應(yīng)用的快速開發(fā)。
功能:支持Matlab/Simulink下建立的動態(tài)系統(tǒng)數(shù)學(xué)模型應(yīng)用于實時仿真、算法測試,便于全流程控制和局部算法驗證。支持控制算法的純數(shù)字仿真和硬件在環(huán)仿真與機器人真機實時控制。支持Simulink環(huán)境下的自動代碼生成與部署、動態(tài)調(diào)參、參數(shù)回顯等調(diào)試功能。
具有機器人基礎(chǔ)運動庫和高級動力學(xué)庫、視覺庫、人工智能算法庫,集成多種總線通訊模塊,支持快速搭建機器人教學(xué)的算法開發(fā)環(huán)境。

控制模式:位置,速度,力;
開發(fā)語言:MATLAB, C/C++;
提供完整實驗工程及demo;
支持通信方式:EtherCAT,TCP/IP,UDP
開放機器人底層控制能力,包括軸力控制接口、笛卡爾力控接口、軸位置控制接口、笛卡爾位置控制、笛卡爾阻抗控制、關(guān)節(jié)阻抗控制、笛卡爾恒力控制。
提供機器人模型庫,包括正逆運動學(xué)、正逆動力學(xué)模型和基礎(chǔ)的運動控制、力控制API,支持外部高動態(tài)控制,最高通信頻率1kHz,全狀態(tài)反饋,包括笛卡爾空間和軸空間的位置、速度、力信息。
3、6D力反饋系統(tǒng)


6D力反饋系統(tǒng), 為一款具有工作空間較大并在所有6自由度上提供力反饋的觸覺設(shè)備,接口刷新率最高可達1K赫茲。用戶使用放置在尖端處的夾持器或手柄 (稱為 “末端執(zhí)行器”) 來握住觸覺裝置。兼容市場主流力反饋公司開發(fā)工具包(兼容法國Haption驅(qū)動;可選配兼容3dsystems、CHAI3D、Unity);
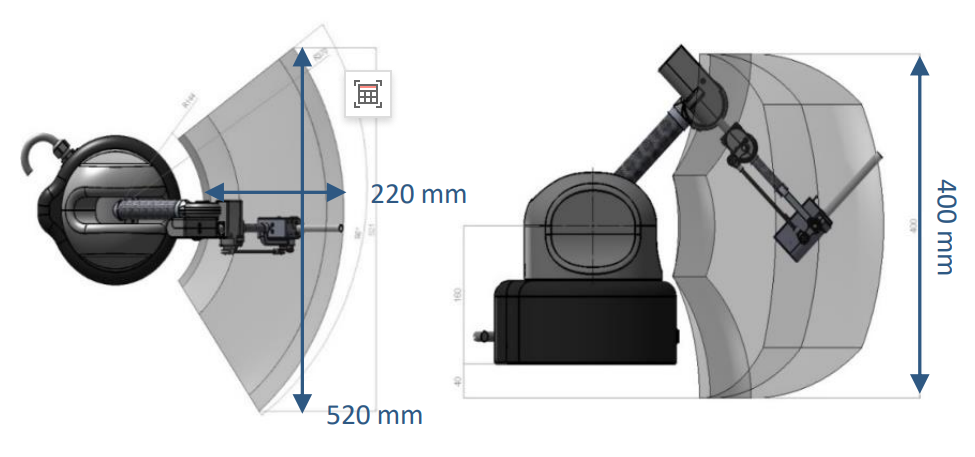
工作范圍:520x 220 x 400 mm
旋轉(zhuǎn)工作空間:260° x 95° x 240°
可施加力(工作區(qū)的中心):10 N (最大)/ 3 N (持續(xù))
旋轉(zhuǎn)力:0.8Nm(最大) / 0.2Nm(持續(xù))
位置分辨率: 0.023mm
旋轉(zhuǎn)分辨率:0.0023 °
設(shè)備重量: ~5KG
傳輸速率:1000HZ
兼容性:兼容開發(fā)工具包(兼容法國 haption驅(qū)動;可兼容3dsystems、CHAI3D、Unity、)
4、3D視覺系統(tǒng)
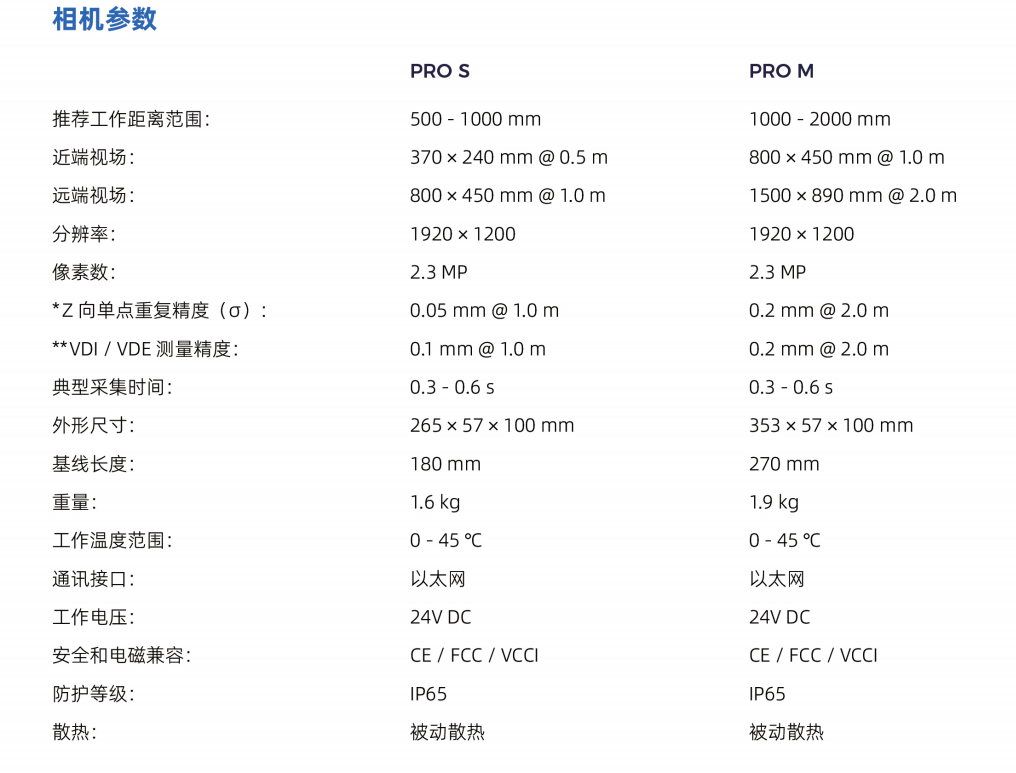
1)工業(yè)級3D相機

①智能程度高
基于先進的視覺算法,可處理各類工件以及紙箱、麻袋、貨品等典型物體,輕松應(yīng)對隨意堆疊、無序放置、一定程度反光、暗色等復(fù)雜工況。
②穩(wěn)定可靠
Mech-Eye工業(yè)級3D相機具備IP65防護等級,可在嚴(yán)苛的環(huán)境中穩(wěn)定運行,且已通過CE、FCC、VCCI及RoHS認(rèn)證。
③開放性強,部署簡單高效
提供多語言、多平臺的SDK選擇,接口開放,部署簡單。可選擇搭配Mech-Vision、Mech-Viz使用,輕松、快速部署各類檢測/量測應(yīng)用。

2)圖形化視覺處理軟件
完全圖形化的視覺軟件,無需編寫代碼即可完成拆垛、無序工件上料等視覺應(yīng)用。
內(nèi)置3D視覺、深度學(xué)習(xí)等前沿算法模塊,可滿足復(fù)雜多樣的應(yīng)用需求。

(圖形化視覺處理軟件)
3)機器人智能編程軟件
完全圖形化的機器人智能編程環(huán)境,支持?jǐn)?shù)字孿生。
內(nèi)置軌跡規(guī)劃、碰撞檢測、混碼等智能算法,適配國內(nèi)外眾多主流品牌機器人,如ABB、KUKA、FANUC、DENSO、UR、AUBO、ROKAE、JAKA等。

4)機器視覺深度學(xué)習(xí)平臺軟件
包括缺陷檢測、分類、實例分割等功能,可對物體快速識別、定位、判斷物體狀態(tài)以及檢測缺陷算法。
深度學(xué)習(xí)自主訓(xùn)練工具,將深度學(xué)習(xí)模型訓(xùn)練的數(shù)據(jù)采集、篩選、導(dǎo)入、標(biāo)注、模型訓(xùn)練、驗證及部署應(yīng)用的過程進行全流程整合,方便自主操作,提升訓(xùn)練效率,并全程保證數(shù)據(jù)安全性。

五、平臺配置清單






客戶服務(wù)電話:
027-87018711
 掃描二維碼關(guān)注我們
掃描二維碼關(guān)注我們
聯(lián)系電話:李經(jīng)理 13720126958 陳經(jīng)理 13387619634 郵箱:wheckert@126.com
公司地址:湖北省武漢東湖新技術(shù)開發(fā)區(qū)關(guān)東街道湯遜湖北路36號武漢理工大科技園新能源研發(fā)基地2棟08層801
版權(quán)所有 ©2019-2050 武漢艾克特科技有限公司 鄂ICP備19030040號-1